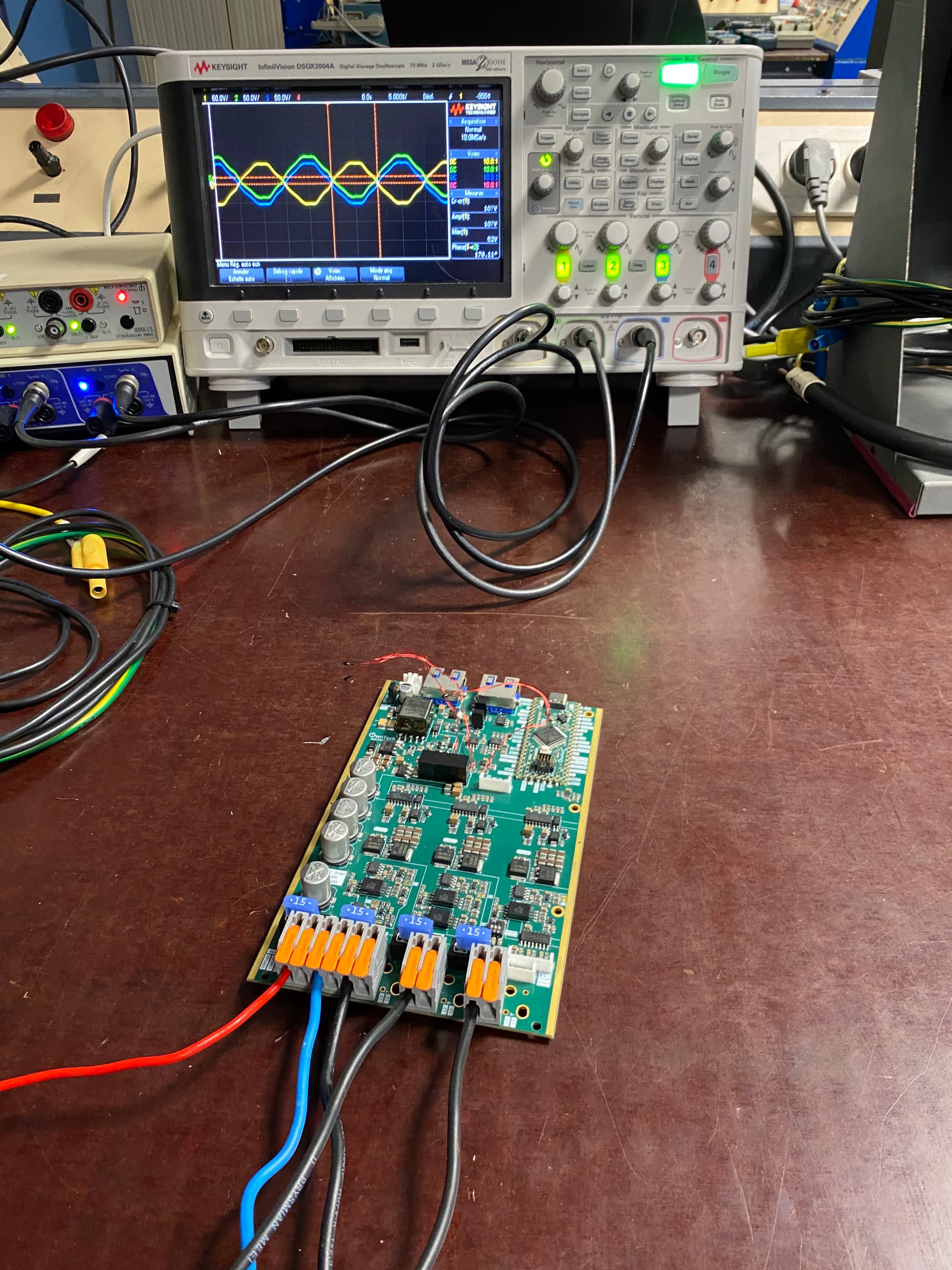
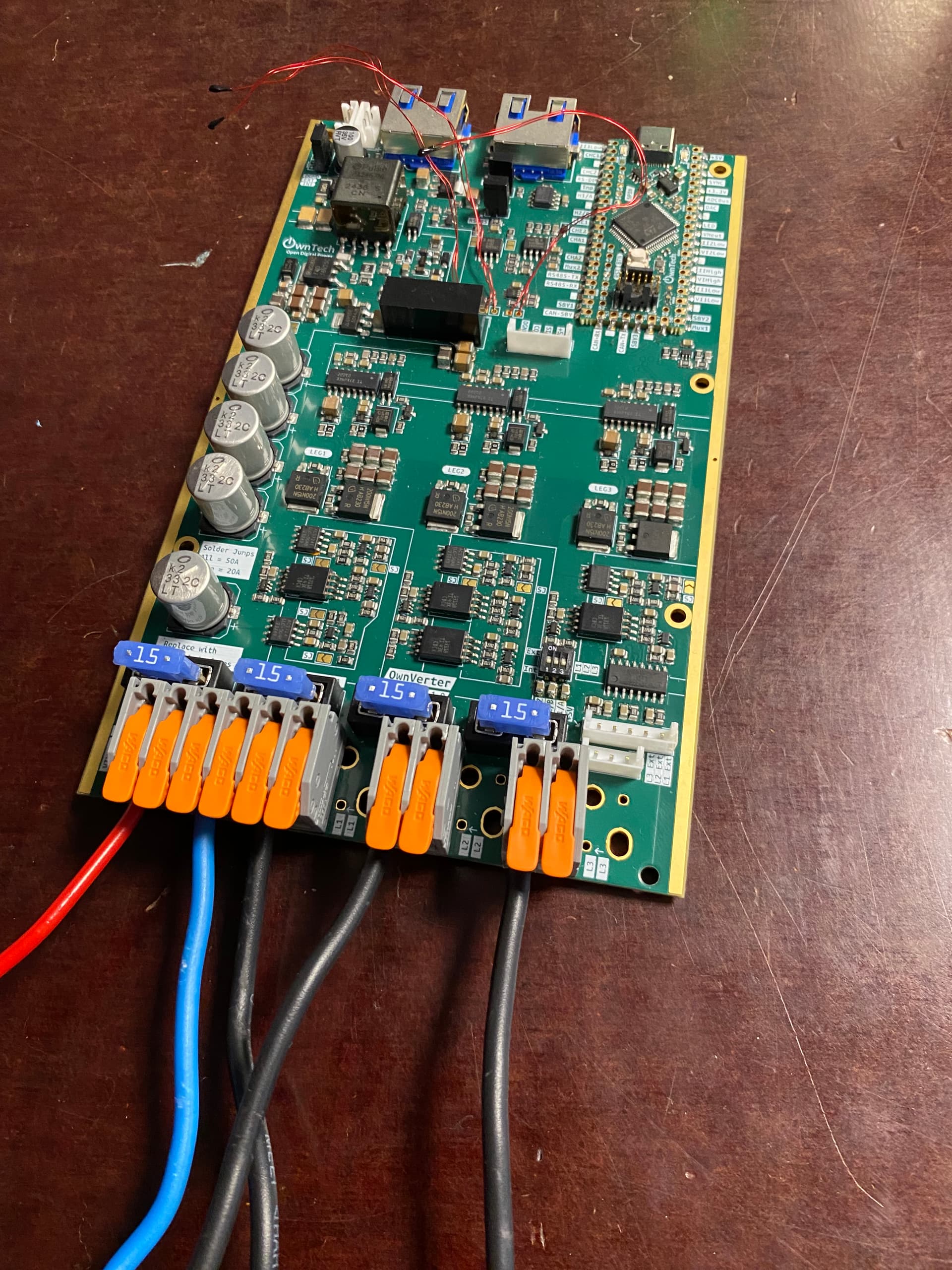
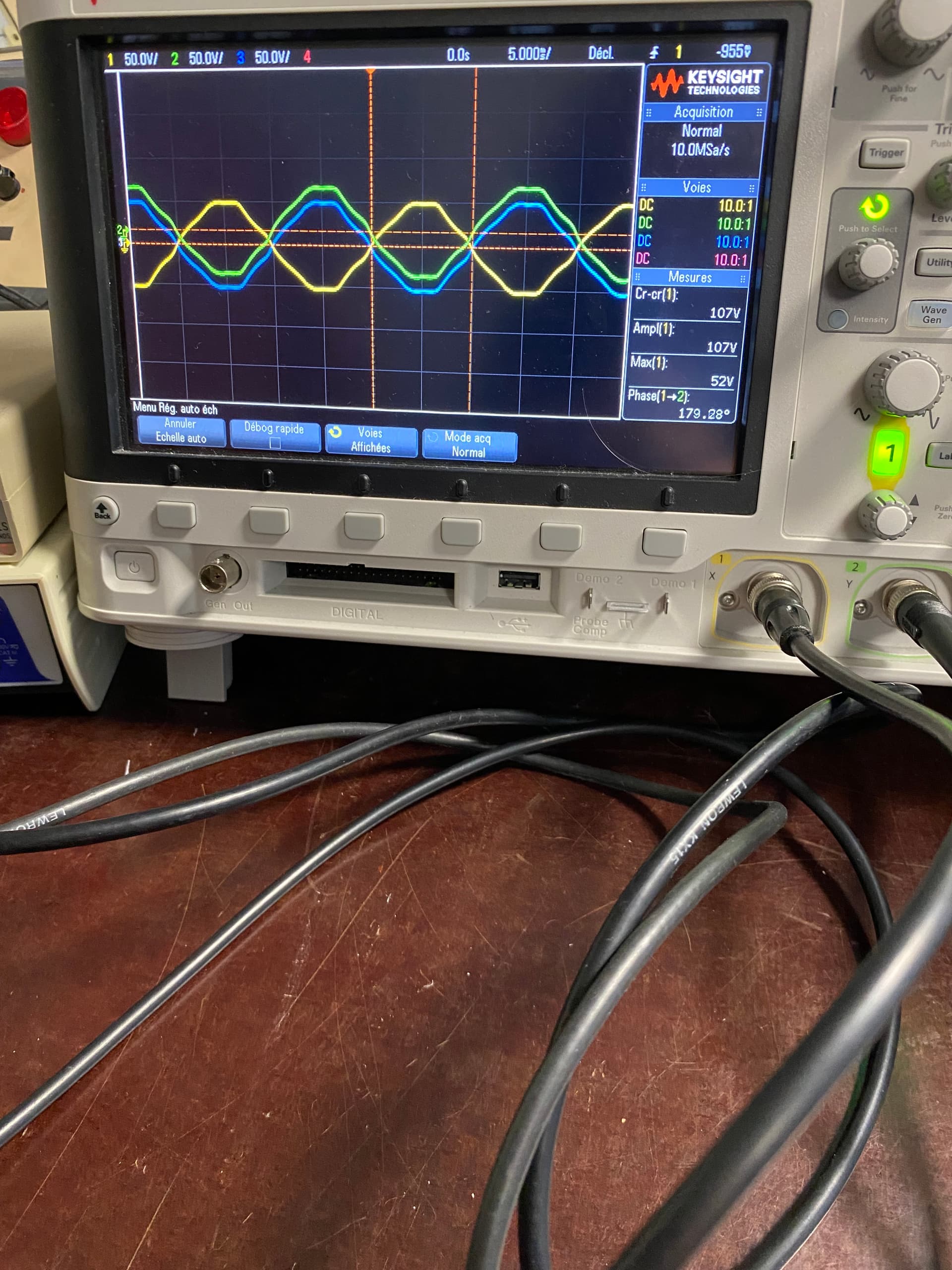
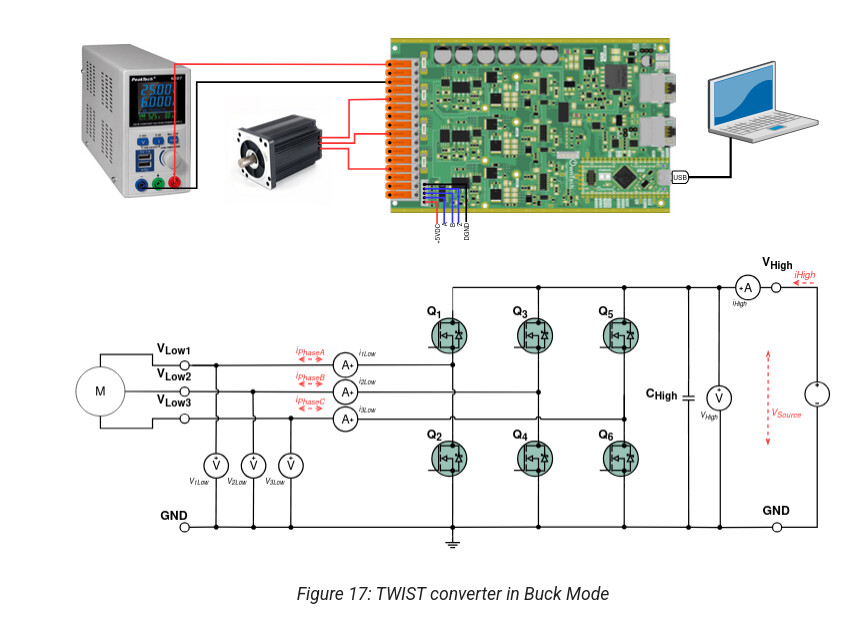
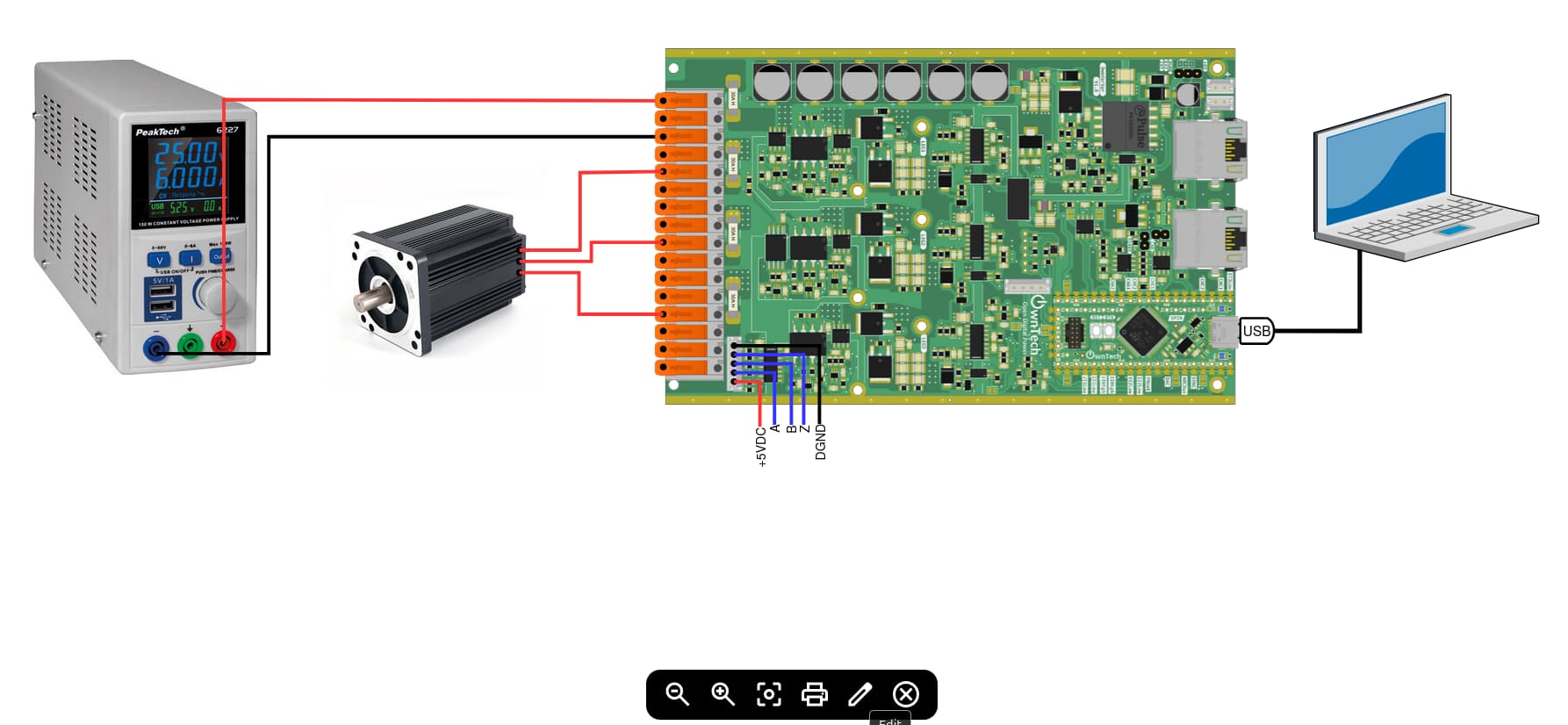
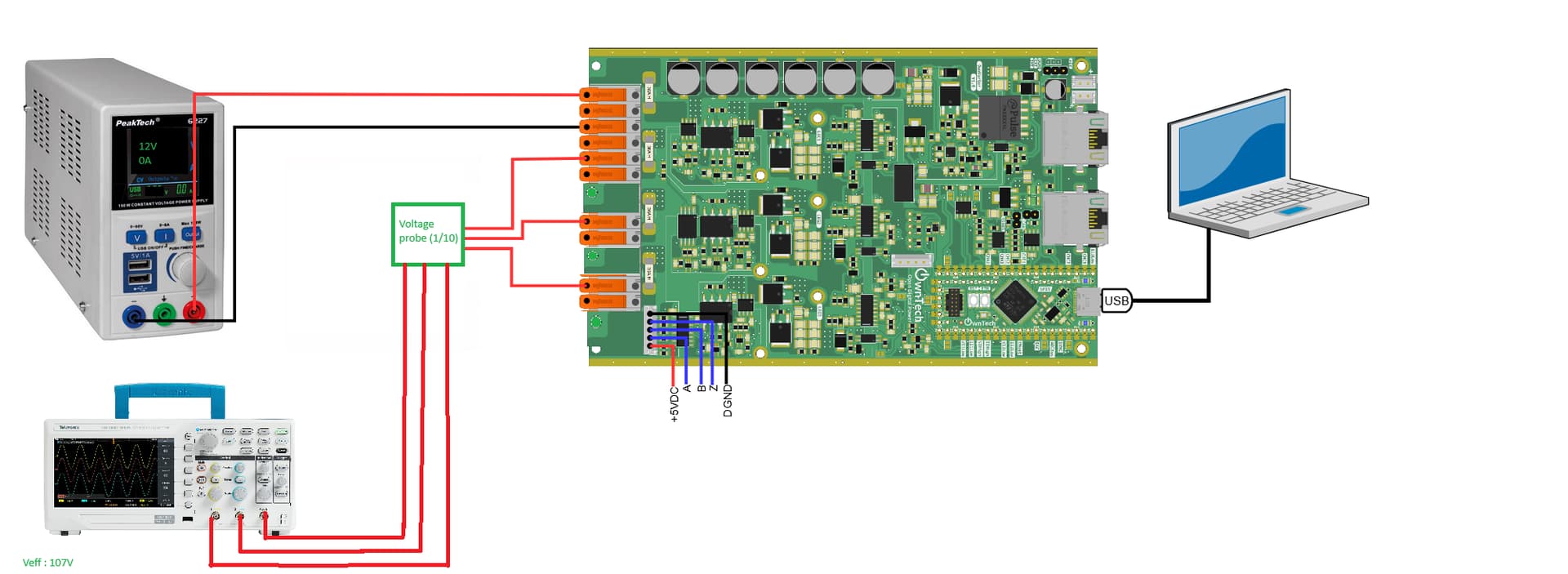
Hello ! Thank you for your response. Here’s our scematic connexion and our main.cpp
And the main.cpp :
/\*
* Copyright (c) 2024-present LAAS-CNRS
*
* This program is free software: you can redistribute it and/or modify
* it under the terms of the GNU Lesser General Public License as published by
* the Free Software Foundation, either version 2.1 of the License, or
* (at your option) any later version.
*
* This program is distributed in the hope that it will be useful,
* but WITHOUT ANY WARRANTY; without even the implied warranty of
* MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
* GNU Lesser General Public License for more details.
*
* You should have received a copy of the GNU Lesser General Public License
* along with this program. If not, see <https://www.gnu.org/licenses/>.
*
* SPDX-License-Identifier: LGPL-2.1
\*/
/\*\*
* @briefbrief This file is an example of a Field Oriented Control for
*
OwnTech OwnVerter board.
*
Please check example documentation to get more details
*
how to use this example: https://docs.owntech.org/examples/
* @author
* @author Régis Ruelland <regis.ruelland@>@author<aas.fr>
* @author Jean Alinei <[email protected]>
\*/
/\* --------------OWNTECH APIs---------------------------------- \*/
#include “ScopeMimicry.h”
#include “SpinAPI.h”
#include “TaskAPI.h”
#include “ShieldAPI.h”
#include “arm_math_types.h”
#include “control_factory.h”
#include “transform.h”
#include “trigo.h”
#include “zephyr/console/console.h”
/\* --------------SETUP FUNCTIONS DECLARATION------------------- \*/
/\* Setups the hardware and software of the system \*/
void setup_routine();
/\* --------------LOOP FUNCTIONS DECLARATION-------------------- \*/
/\* Code to be executed in the background task */
void loop_background_task();
/* Code to be executed in real time in the critical \*/
void loop_critical_task();
void application_task();
/\* --------------USER VARIABLES DECLARATIONS------------------- \*/
#define HALL1 PC6
#define HALL2 PC7
#define HALL3 PD2
static const float32_t AC_CURRENT_LIMIT = 3.0;
static const float32_t DC_CURRENT_LIMIT = 2.0;
/\* Used in the control algorithm */
static const float32_t MIN_DC_VOLTAGE = 30.0F;
/* Used as a threshold to start POWER mode \*/
static const float32_t V_HIGH_MIN = 5.0;
static const float32_t Ts = 100.e-6F;
static const uint32_t control_task_period = (uint32_t)(Ts \* 1.e6F);
/\* Hall effect sensors \*/
static uint8_t HALL1_value;
static uint8_t HALL2_value;
static uint8_t HALL3_value;
static uint8_t angle_index;
static float32_t hall_angle;
static PllAngle pllangle = controlLibFactory.pllAngle(Ts, 10.0F, 0.04F);
static PllDatas pllDatas;
static float32_t angle_filtered;
static float32_t w_meas;
/\*
* One sector for one index value
* Index = H1*2^0 + H2*2^1 + H3\*2^2
\*/
static int16_t sector[ ] = {-1, 5, 1, 0, 3, 4, 2};
static float32_t k_angle_offset = 0.0F;
/\* Power LEG measures \*/
static float32_t meas_data;
static float32_t I1_low_value;
static float32_t I2_low_value;
static float32_t I1_offset;
static float32_t I2_offset;
static float32_t tmpI1_offset;
static float32_t tmpI2_offset;
static const float32_t NB_OFFSET = 2000.0;
static float32_t V1_low_value;
static float32_t V2_low_value;
static float32_t V12_value;
/\* DC measures \*/
static float32_t I_high;
static float32_t V_high;
/\* Three phase system and Park DQ Frame (dqo) \*/
static three_phase_t Vabc;
static three_phase_t duty_abc;
static three_phase_t Iabc;
static dqo_t Vdq;
static dqo_t Idq;
static dqo_t Idq_ref;
static float32_t angle_4_control;
/\* Variables used to get static value for ScopeMimicry \*/
static three_phase_t Iabc_ref;
static float32_t duty_a, duty_b;
static float32_t Ia_ref;
static float32_t Ib_ref;
static float32_t Va;
static float32_t Iq_meas;
static float32_t Iq_ref;
static float32_t Iq_max;
static float32_t Vd, Vq;
static float32_t HALL1_value_f;
static float32_t HALL2_value_f;
static float32_t HALL3_value_f;
static float32_t angle_index_f;
/\* We only make torque control. \*/
static float32_t manual_Iq_ref;
/\*\*
* Low Pass Filters Init
\*/
static LowPassFirstOrderFilter vHigh_filter =
controlLibFactory.lowpassfilter(Ts, 5.0e-3F);
static LowPassFirstOrderFilter w_mes_filter =
controlLibFactory.lowpassfilter(Ts, 5.0e-3F);
static float32_t V_high_filtered;
static float32_t inverse_Vhigh;
/\*\*
* PID
\*/
static float32_t Kp = 30 \* 0.035;
static float32_t Ti = 0.002029;
static float32_t Td = 0.0F;
static float32_t N = 1.0;
/\* Coefficient 0.4 comes from Va_max = (α\_max - 0.5) \* Udc \*/
static float32_t lower_bound = -MIN_DC_VOLTAGE \* 0.4;
static float32_t upper_bound = MIN_DC_VOLTAGE \* 0.4;
static Pid pi_d = controlLibFactory.pid(Ts, Kp, Ti, Td, N,
lower_bound, upper_bound);
static Pid pi_q = controlLibFactory.pid(Ts, Kp, Ti, Td, N,
lower_bound, upper_bound);
/\* Decimation is used to limit the rate of measurement plotted in ScopeMimicry\*/
const static uint32_t decimation = 10;
static uint32_t counter_time;
float32_t counter_time_f;
static float32_t w_estimate;
uint8_t received_serial_char;
/\* List of possible modes for the OwnTech power shield \*/
enum serial_interface_menu_mode
{
IDLEMODE = 0,
POWERMODE = 1,
};
/\* List of possible control states \*/
enum control_state_mode {
OFFSET_ST = 0,
IDLE_ST = 1,
POWER_ST = 2,
ERROR_ST = 3
};
enum control_state_mode control_state;
static float32_t control_state_f;
static uint16_t error_counter;
static bool pwm_enable;
uint8_t asked_mode = IDLEMODE;
/\*\*
* Definition of variables and functions for plotting real time values
* using ScopeMimicry.
\*/
const uint16_t SCOPE_SIZE = 512;
uint16_t k_app_idx;
ScopeMimicry scope(SCOPE_SIZE, 12);
static bool is_downloading;
static bool memory_print;
bool mytrigger()
{
return (control_state == POWER_ST);
}
void dump_scope_datas(ScopeMimicry &scope) {
printk(“begin record\\n”);
scope.reset_dump();
while (scope.get_dump_state() != finished) {
printk(“%s”, scope.dump_datas());
task.suspendBackgroundUs(200);
}
printk(“end record\\n”);
}
/\*\*
* VHigh Filter and PID init function
\*/
void init_filt_and_reg(void)
{
pllangle.reset(0.F)@brief
vHigh_filt@[email protected](V_HIGH_MIN);
pi_d.reset();
pi_q.reset();
error_counter = 0;
}
/\*\*
* @brief A period-meter function which estim@paramte pu@paramsation
* @paramor the sector varia@paramle (one integer@@returnaramvalue@paramcorrespond@retur@returnto π/3).
*
* @param sector assume sector is integer in \[0, 5\]
* @param time in \[s\]
* @return pulsation (float)
*/
float32_t pulsation_estimator(int16_t sector, float32_t time)
{
static float32_t w_estimate_intern = 0.0F;
static int16_t prev_sector;
static float32_t prev_time = 0.0F;
int16_t delta_sector;
float32_t sixty_degre_step_time;
delta_sector = sector - prev_sector;
prev_sector = sector;
if (delta_sector == 1 || delta_sector == -5) {
/* positive speed \*/
sixty_degre_step_time = (time - prev_time);
w_estimate_intern = (PI / 3.0) / sixty_degre_step_time;
prev_time = time;
}
if (delta_sector == -1 || delta_sector == 5) {
sixty_degre_step_time = (time - prev_time);
w_estimate_intern = (-PI / 3.0) / sixty_degre_step_time;
prev_time = time;
}
return w_estimate_intern;
}
/\*\*
* Function that retrieves necessary measurements from power shield sensors.
\*/
inline void retrieve_analog_datas()
{
meas_data = shield.sensors.getLatestValue(I1_LOW);
if (meas_data != NO_VALUE) {
I1_low_value = meas_data + I1_offset;
}
meas_data = shield.sensors.getLatestValue(I2_LOW);
if (meas_data != NO_VALUE) {
I2_low_value = meas_data + I2_offset;
}
if (control_state == OFFSET_ST && counter_time < NB_OFFSET) {
tmpI1_offset += I1_low_value;
tmpI2_offset += I2_low_value;
}
meas_data = shield.sensors.getLatestValue(V_HIGH);
if (meas_data != NO_VALUE) {
V_high = meas_data;
}
meas_data = shield.sensors.getLatestValue(I_HIGH);
if (meas_data != NO_VALUE) {
/\* Sign is negative because of the way hardware sensor is routed \*/
I_high = -meas_data;
}
meas_data = shield.sensors.getLatestValue(V1_LOW);
if (meas_data != NO_VALUE) {
V1_low_value = meas_data;
}
meas_data = shield.sensors.getLatestValue(V2_LOW);
if (meas_data != NO_VALUE) {
V2_low_value = meas_data;
}
/\* Vhigh measurement gets additional filtering \*/
V_high_filtered = vHigh_filter.calculateWithReturn(V_high);
V12_value = V1_low_value - V2_low_value;
}
/\*\*
* Reads Hall sensors and estimate position and speed.
*/
inline void get_position_and_speed()
{
/* We get individual HALL sensor readings */
HALL1_value = spin.gpio.readPin(HALL1);
HALL2_value = spin.gpio.readPin(HALL2);
HALL3_value = spin.gpio.readPin(HALL3);
/* We compute angle index using HALL values. \*/
angle_index = HALL1_value \* 1 + HALL2_value \* 2 + HALL3_value \* 4;
hall_angle =
ot_modulo_2pi(PI / 3.0 \* sector\[angle_index\] +
PI \* k_angle_offset / 24.0);
w_estimate = pulsation_estimator(sector\[angle_index\], counter_time \* Ts);
pllDatas = pllangle.calculateWithReturn(hall_angle);
angle_filtered = pllDatas.angle;
w_meas = w_mes_filter.calculateWithReturn(pllDatas.w);
}
/\*\*
* Handles current limits and switch to Error state if limits exceeded.
\*/
inline void overcurrent_mngt()
{
if (I1_low_value > AC_CURRENT_LIMIT || I1_low_value < -AC_CURRENT_LIMIT ||
I2_low_value > AC_CURRENT_LIMIT || I2_low_value < -AC_CURRENT_LIMIT ||
I_high > DC_CURRENT_LIMIT) {
error_counter++;
}
if (error_counter > 2) {
control_state = ERROR_ST;
}
}
/\*\*
* Stops PWM and reset filter and PID states
*/
inline void stop_pwm_and_reset_states_ifnot()
{
if (pwm_enable == true) {
shield.power.stop(ALL);
/* Reset filters and pid \*/
init_filt_and_reg();
pwm_enable = false;
}
}
/\*\*
* Performs Torque control using Field Oriented Control algorithm
\*/
inline void control_torque()
{
angle_4_control = angle_filtered;
Idq_ref.q = manual_Iq_ref;
/\* Saturation \*/
if (Idq_ref.q > Iq_max) {
Idq_ref.q = Iq_max;
}
if (Idq_ref.q < -Iq_max) {
Idq_ref.q = -Iq_max;
}
Idq_ref.d = 0.0F;
Iabc.a = I1_low_value;
Iabc.b = I2_low_value;
Iabc.c = -(Iabc.a + Iabc.b);
Idq = Transform::to_dqo(Iabc, angle_4_control);
Vdq.d = pi_d.calculateWithReturn(Idq_ref.d, Idq.d);
Vdq.q = pi_q.calculateWithReturn(Idq_ref.q, Idq.q);
Vdq.o = 0.0F;
Vabc = Transform::to_threephase(Vdq, angle_4_control);
}
/\*\*
* Helper function that computes duty cycles from ABC frame.
\*/
inline void compute_duties()
{
inverse_Vhigh = 1.0 / MIN_DC_VOLTAGE;
duty_abc.a = (Vabc.a \* inverse_Vhigh + 0.5);
duty_abc.b = (Vabc.b \* inverse_Vhigh + 0.5);
duty_abc.c = (Vabc.c \* inverse_Vhigh + 0.5);
}
/\*\*
* Helper function that set the duty cycles to the power shield.
\*/
inline void apply_duties()
{
shield.power.setDutyCycle(LEG1, duty_abc.a);
shield.power.setDutyCycle(LEG2, duty_abc.b);
shield.power.setDutyCycle(LEG3, duty_abc.c);
}
/\*\*
* Helper function to start the power shield PWMs
\*/
void start_pwms_ifnot()
{
if (!pwm_enable) {
pwm_enable = true;
shield.power.start(ALL);
}
}
/\*\*
* Setter function for required variables
*/
void init_variables()
{
/* Time counter */
counter_time = 0;
/* Measurements variables */
I1_low_value = 0.0F;
I2_low_value = 0.0F;
I_high = 0.0F;
V_high = 0.0F;
/* Offset variables */
I1_offset = 0.0F;
I2_offset = 0.0F;
tmpI1_offset = 0.0F;
tmpI2_offset = 0.0F;
/* State view of the pwm */
pwm_enable = false;
/* Idle or power mode\*/
asked_mode = IDLEMODE;
/\* We begin to measure the current offset before all */
control_state = OFFSET_ST;
Iq_max = 2.0;
manual_Iq_ref = 0.0F;
}
/* --------------SETUP FUNCTIONS------------------------------- \*/
/\*\*
* In this setup routine :
* * Power shield is initialized
*
- Shield is set in Buck Mode.
*
- Default sensors are activated
*
- GPIOs are set for Hall effect sensor
* * ScopeMimicry is initialized
* * VHigh filter and PIDs are initialized
* * LED is turned on.
* * Tasks are initialized and started
*/
void setup_routine()
{
/* Setup the hardware first \*/
shield.power.initBuck(ALL);
shield.sensors.enableDefaultOwnverterSensors();
spin.gpio.configurePin(HALL1, INPUT);
spin.gpio.configurePin(HALL2, INPUT);
spin.gpio.configurePin(HALL3, INPUT);
/\* Scope configuration */
scope.connectChannel(V12_value, “V12_value”); /* 0 */
scope.connectChannel(Vq, “Vq”); /* 1 */
scope.connectChannel(Vd, “Vd”); /* 2 */
scope.connectChannel(I1_low_value, “I1_low_value”); /* 3 */
scope.connectChannel(I2_low_value, “I2_low_value”); /* 4 */
scope.connectChannel(I_high, “I_high_value”); /* 5 */
scope.connectChannel(Iq_meas, “Iq_meas”); /* 6 */
scope.connectChannel(angle_filtered, “angle_filtered”); /* 7 */
scope.connectChannel(Ib_ref, “Ib_ref”); /* 8 */
scope.connectChannel(hall_angle, “hall_angle”); /* 9 */
scope.connectChannel(Ia_ref, “Ia_ref”); /* 10 */
scope.connectChannel(control_state_f, “control_state”); /* 11 \*/
scope.set_trigger(&mytrigger);
scope.set_delay(0.0);
scope.start();
/\* Initialize values \*/
init_filt_and_reg();
init_variables();
spin.led.turnOn();
/\* Declare tasks \*/
uint32_t background_task_number =
task.createBackground(loop_background_task);
uint32_t app_task_number = task.createBackground(application_task);
task.createCritical(loop_critical_task, control_task_period);
/\* Finally, start tasks \*/
task.startBackground(background_task_number);
task.startBackground(app_task_number);
task.startCritical();
}
/\* --------------LOOP FUNCTIONS-------------------------------- \*/
/\*\*
* This background task retrieve user inputs to control the OwnVerter:
* * P and I keys respectively Power ON and Power OFF the inverter
* * U and D keys respectively Increase and Decrease Iq reference.
* * R Q and M keys are used to control ScopeMimicry data retrieval.
*/
void loop_background_task()
{
received_serial_char = console_getchar();
switch (received_serial_char) {
case ‘p’:
printk(“power asked”);
asked_mode = POWERMODE;
scope.start();
break;
case ‘i’:
printk(“idle asked”);
asked_mode = IDLEMODE;
break;
case ‘r’:
is_downloading = true;
case ‘u’:
manual_Iq_ref += 0.1;
break;
case ‘d’:
manual_Iq_ref -= 0.1F;
break;
case ‘m’:
/* To print scope datas in ownplot as soon as possible */
memory_print = !memory_print;
break;
case ‘q’:
/* Relaunch scope acquisition \*/
scope.start();
break;
}
}
/\*\*
* This application task sends data over USB Serial.
\*/
void application_task()
{
if (!memory_print) {
printk(“%7.2f”, V_high);
printk(“%7.2f:”, k_angle_offset);
printk(“%7.2f:”, Iq_max);
printk(“%7.2f:”, manual_Iq_ref);
printk(“%7.2f:”, I1_offset);
printk(“%7d:”, control_state);
printk(“%7d\\n”, angle_index);
} else {
/\* If memory_print is true then we plot scope datas in an infinite loop
\* This can be used with ownplot if you have not python script installed
\* to plot downloaded data using dump_scope_datas().
\*/
k_app_idx = (k_app_idx + 1) % SCOPE_SIZE;
printk(“%.2f:”, scope.get_channel_value(k_app_idx, 0));
printk(“%.2f:”, scope.get_channel_value(k_app_idx, 1));
printk(“%.2f:”, scope.get_channel_value(k_app_idx, 2));
printk(“%.2f:”, scope.get_channel_value(k_app_idx, 3));
printk(“%.2f:”, scope.get_channel_value(k_app_idx, 4));
printk(“%.2f:”, scope.get_channel_value(k_app_idx, 5));
printk(“%.2f:”, scope.get_channel_value(k_app_idx, 6));
printk(“%.2f:”, scope.get_channel_value(k_app_idx, 7));
printk(“%.2f:”, scope.get_channel_value(k_app_idx, 8));
printk(“%.2f:”, scope.get_channel_value(k_app_idx, 9));
printk(“\\n”);
}
if (is_downloading) {
dump_scope_datas(scope);
is_downloading = false;
}
switch (control_state) {
case OFFSET_ST:
if (counter_time > (uint32_t)NB_OFFSET) {
spin.led.turnOff();
I1_offset = -tmpI1_offset / NB_OFFSET;
I2_offset = -tmpI2_offset / NB_OFFSET;
control_state = IDLE_ST;
}
break;
case IDLE_ST:
if ((asked_mode == POWERMODE) && (V_high_filtered > V_HIGH_MIN)) {
control_state = POWER_ST;
}
break;
case POWER_ST:
if (asked_mode == IDLEMODE) {
control_state = IDLE_ST;
}
break;
case ERROR_ST:
if (asked_mode == IDLEMODE) {
error_counter = 0;
control_state = IDLE_ST;
}
break;
}
task.suspendBackgroundMs(250);
}
/\*\*
* This is the critical task that runs at 10kHz.
* It performs the Field Oriented Control.
\*/
void loop_critical_task()
{
counter_time++;
retrieve_analog_datas();
get_position_and_speed();
overcurrent_mngt();
switch (control_state) {
case OFFSET_ST:
stop_pwm_and_reset_states_ifnot();
break;
case IDLE_ST:
stop_pwm_and_reset_states_ifnot();
break;
case ERROR_ST:
stop_pwm_and_reset_states_ifnot();
break;
case POWER_ST:
/\* Control loop is executed here \*/
control_torque();
compute_duties();
apply_duties();
start_pwms_ifnot();
break;
}
/\* Decimation is used to reduce rate of plotting in ScopeMimicry \*/
if (counter_time % decimation == 0) {
angle_index_f = angle_index;
Va = Vabc.a;
duty_a = duty_abc.a;
duty_b = duty_abc.b;
Iq_ref = Idq_ref.q;
Iq_meas = Idq.q;
Vd = Vdq.d;
Vq = Vdq.q;
Iabc_ref = Transform::to_threephase(Idq_ref, angle_4_control);
Ia_ref = Iabc_ref.a;
Ib_ref = Iabc_ref.b;
counter_time_f = (float32_t)counter_time;
HALL1_value_f = HALL1_value;
HALL2_value_f = HALL2_value;
HALL3_value_f = HALL3_value;
control_state_f = control_state;
scope.acquire();
}
}
int main(void)
{
setup_routine();
return 0;
}
Thank you, and have a nice day 
Thomas